


Random Signals and LTI-Systems
🏃🏻 Getting Started Guide
This document can be executed directly on the Bohrium Notebook. To begin, click the Connect button located at the top of the interface, then select the digital-signal-processing:Digital-Signal-Processing-Lecture Image and choose your desired machine configuration to proceed.
📖 Source
This Notebook is from a famous Signal Processing Lecture. The notebooks constitute the lecture notes to the masters course Digital Signal Processing read by Sascha Spors, Institute of Communications Engineering, Universität Rostock.
This jupyter notebook is part of a collection of notebooks on various topics of Digital Signal Processing. Please direct questions and suggestions to Sascha.Spors@uni-rostock.de.
Introduction
The response of a system to a random input signal is the foundation of statistical signal processing. In the following we limit ourselves to linear-time invariant (LTI) systems.

In the following it is assumed that the statistical properties of the input signal are known. For instance, its first- and second-order ensemble averages. It is further assumed that the impulse response or the transfer function of the LTI system is given. We are looking for the statistical properties of the output signal and the joint properties between the input and output signal.
Stationarity and Ergodicity
The question arises if the output signal of an LTI system is (wide-sense) stationary or (wide-sense) ergodic for an input signal exhibiting the same properties.
Let's assume that the input signal is drawn from a stationary random process. According to the definition of stationarity the following relation must hold
where denotes an arbitrary (temporal) shift and an arbitary mapping function. The condition for time-invariance of a system reads
for . Applying the system operator to the left- and right-hand side of the definition of stationarity for the input signal and recalling the linearity of the expectation operator yields
where denotes an arbitrary mapping function that may differ from . From the equation above, it can be concluded that the output signal of an LTI system for a stationary input signal is also stationary. The same reasoning can also be applied to an ergodic input signal. Since both wide-sense stationarity (WSS) and wide-sense ergodicity are special cases of the general case, the derived results hold also here.
Summarizing, for an input signal that is
- (wide-sense) stationary, the output signal is (wide-sense) stationary and the in- and output is jointly (wide-sense) stationary
- (wide-sense) ergodic, the output signal is (wide-sense) ergodic and the in- and output is jointly (wide-sense) ergodic
This implies for instance, that for a WSS input signal measures like the auto-correlation function (ACF) can also be applied to the output signal of an LTI system.
Example - Response of an LTI system to a random signal
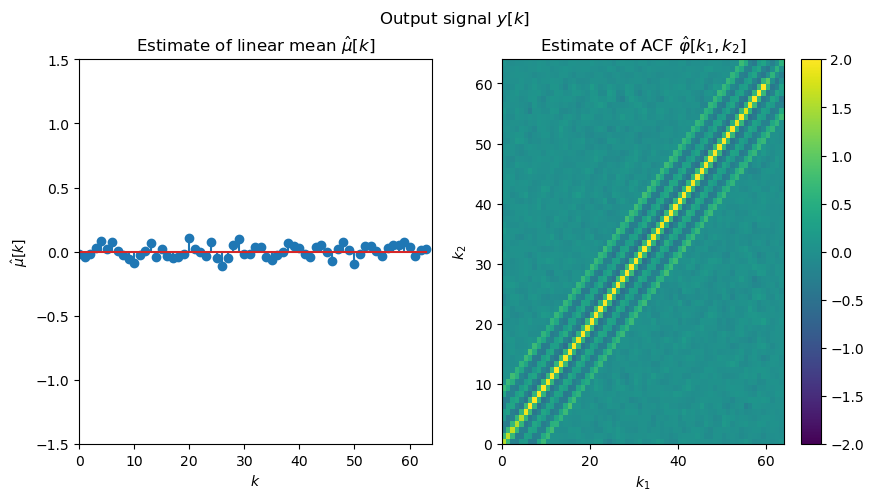
The following example computes and plots estimates of the linear mean and auto-correlation function (ACF) for the in- and output of an LTI system. The input is drawn from a normally distributed white noise process.

Exercise
- Are the in- and output signals WSS?
- Can the output signal be assumed to be white noise?
Solution: From the shown results it can assumed for the input signal that the linear mean does not depend on the time-index and that the ACF does only depend on the difference of both time indexes. The same holds also for the output signal . Hence both the in- and output signal are WSS. Although the input signal can be assumed to be white noise, the output signal is not white noise due to its ACF .
Copyright
This notebook is provided as Open Educational Resource. Feel free to use the notebook for your own purposes. The text is licensed under Creative Commons Attribution 4.0, the code of the IPython examples under the MIT license. Please attribute the work as follows: Sascha Spors, Digital Signal Processing - Lecture notes featuring computational examples.